Guide complet d’OpenMind : conception d’un système d’exploitation mondial et d’un réseau de confiance dédiés à l’intelligence incarnée
Pourquoi une ère de la robotique ouverte est-elle indispensable ?
Au cours des cinq à huit prochaines années, la population mondiale de robots devrait dépasser un milliard. Ce jalon annonce un changement d’ère : les robots cessent d’être de simples démonstrations isolées pour devenir des acteurs majeurs de la division du travail dans nos sociétés. Ils ne seront plus seulement des bras mécaniques sur les chaînes de montage : ils deviendront collègues, enseignants et partenaires, pleinement capables de percevoir, de comprendre, de décider et de coopérer avec les humains.
Si le matériel robotique a connu des avancées fulgurantes — mains toujours plus agiles, déplacements stables, capacités sensorielles accrues — le véritable frein réside moins dans la technique que dans la possibilité pour les robots de partager connaissances et collaborer :
- Les logiciels propriétaires persistent, rendant les systèmes entre fabricants incompatibles et empêchant le partage de compétences et d’intelligence.
- Les règles de prise de décision sont confinées dans des environnements fermés, ce qui interdit la vérification et l’optimisation par des parties externes.
- Les architectures de contrôle centralisées brident l’innovation et constituent un obstacle supplémentaire à la confiance.
Cette fragmentation empêche l’industrie robotique de transformer les avancées de l’IA en productivité à grande échelle : de multiples démonstrateurs autonomes apparaissent, mais ils restent incapables de migrer sur divers appareils, d’offrir une prise de décision vérifiable ou une collaboration standardisée. Résultat : l’industrialisation à grande échelle demeure hors d’atteinte. OpenMind s’attaque à cette « dernière ligne droite ». Sa mission ne se limite pas à concevoir un robot dansant : il s’agit de proposer une base logicielle unifiée et une norme de collaboration pour la diversité robotique mondiale :
- Permettre aux robots de comprendre leur contexte et d’apprendre les uns des autres ;
- Offrir aux développeurs la possibilité de créer des applications rapidement grâce à des plateformes open source et modulaires ;
- Assurer une collaboration homme-machine fluide et sécurisée, ainsi que des transactions fiables sous protocoles décentralisés.
En résumé, OpenMind conçoit le système d’exploitation universel de la robotique — capable de combiner perception, action et collaboration sécurisée à grande échelle, dans n’importe quel environnement, grâce à la coopération décentralisée.
Les soutiens de cette vision : 20 millions de dollars et des partenaires mondiaux
OpenMind a réuni 20 millions de dollars lors de ses levées d’amorçage (Seed) et de Série A, menées par Pantera Capital, avec la participation de grands noms de la technologie et de l’investissement à l’échelle internationale :
- Capitaux et technologies occidentaux : Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group, et d’autres. Toutes sont des références durables de l’infrastructure crypto et IA, engagées dans l’émergence de « l’économie des agents » et de « l’internet des machines ».
- Ressources industrielles asiatiques : Sequoia China et d’autres géants, experts des chaînes d’approvisionnement et de la fabrication robotique à grande échelle, forts d’une expérience concrète des défis de l’industrialisation de masse.
En parallèle, OpenMind collabore étroitement avec des acteurs des marchés financiers traditionnels tels que KraneShares pour intégrer la valeur à long terme des « robots + agents IA » à des produits structurés, reliant marchés crypto et actions. En juin 2025, lors du lancement par KraneShares de l’ETF Global Humanoid & Embodied Intelligence Index (KOID), la cloche d’ouverture du NASDAQ a été déclenchée par « Iris », robot humanoïde co-développé par OpenMind et RoboStore : une première dans l’histoire de la bourse américaine pour un robot humanoïde.
Comme l’a résumé Nihal Maunder, associé chez Pantera Capital :
« Pour que des machines intelligentes opèrent dans des environnements ouverts, il faut un réseau d’intelligence ouvert. Ce qu’OpenMind apporte à la robotique, c’est l’équivalent de ce que Linux fut pour le logiciel, ou Ethereum pour la blockchain. »
Équipe et conseil stratégique : de la recherche à l’industrialisation
Jan Liphardt, fondateur d’OpenMind, est professeur associé à Stanford et ancien professeur à Berkeley, spécialiste des systèmes de données et distribués, avec une solide expérience aussi bien technique qu’académique. Son engagement : favoriser la réutilisation open source, substituer les systèmes « boîtes noires » par des mécanismes auditables et traçables, et associer IA, robotique et cryptographie grâce à l’interdisciplinarité.
Le noyau dirigeant associe des talents issus de OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, etc. Ensemble, ils couvrent tous les secteurs clés : contrôle robotique, perception et navigation, orchestration multimodale et LLM, systèmes distribués, protocoles on-chain. Le conseil consultatif, composé de figures du monde académique et industriel — Steve Cousins, directeur de la robotique à Stanford, Bill Roscoe de l’Oxford Blockchain Center, et le professeur Alessio Lomuscio (IA sûre, Imperial College) — veille à la sécurité, la conformité et la fiabilité des solutions robotiques d’OpenMind.
La réponse OpenMind : deux couches, une architecture unifiée
OpenMind a conçu un socle d’infrastructure réutilisable, permettant la collaboration et l’échange d’informations entre robots, quels que soient le fabricant, la marque ou le pays :
- Côté appareil : OM1, système d’exploitation natif IA pour robots physiques, boucle la chaîne complète de la perception à l’action pour que tout robot — peu importe sa morphologie — comprenne son environnement et mène à bien ses missions.
- Côté réseau : FABRIC, véritable réseau décentralisé collaboratif, met à disposition des mécanismes d’identité, d’allocation de tâches et de communication qui permettent aux robots de se reconnaître, se répartir les tâches et partager leur situation en temps réel.
Cette approche “système d’exploitation + couche réseau” permet aux robots non seulement d’agir de façon autonome, mais aussi de coordonner et synchroniser leurs actions pour accomplir ensemble des tâches complexes, dans un réseau collaboratif intégré.
OM1 : système d’exploitation natif IA pour le monde concret
Comme le smartphone a besoin d’iOS ou d’Android pour exécuter des applications, la robotique exige un OS capable de déployer des modèles d’IA, de traiter les données de capteurs, de raisonner et d’agir.
OM1 a été conçu à cet effet : il sert de système d’exploitation natif IA pour robots dans le monde réel. Il leur confère capacité de perception, compréhension, planification et action, en toute circonstance. Contrairement aux systèmes fermés classiques, OM1 est open source, modulaire et indépendant du matériel, couvrant humanoïdes, quadrupèdes, robots sur roues, bras automatisés, etc.
Quatre étapes clés : de la perception à l’action
OM1 décompose l’intelligence machine en quatre étapes fondamentales : Perception → Mémoire → Planification → Action. Chaque étape fait l’objet d’une modularisation standardisée qui permet de combiner, assembler et valider tous les modules d’intelligence au moyen d’un langage de données unifié.
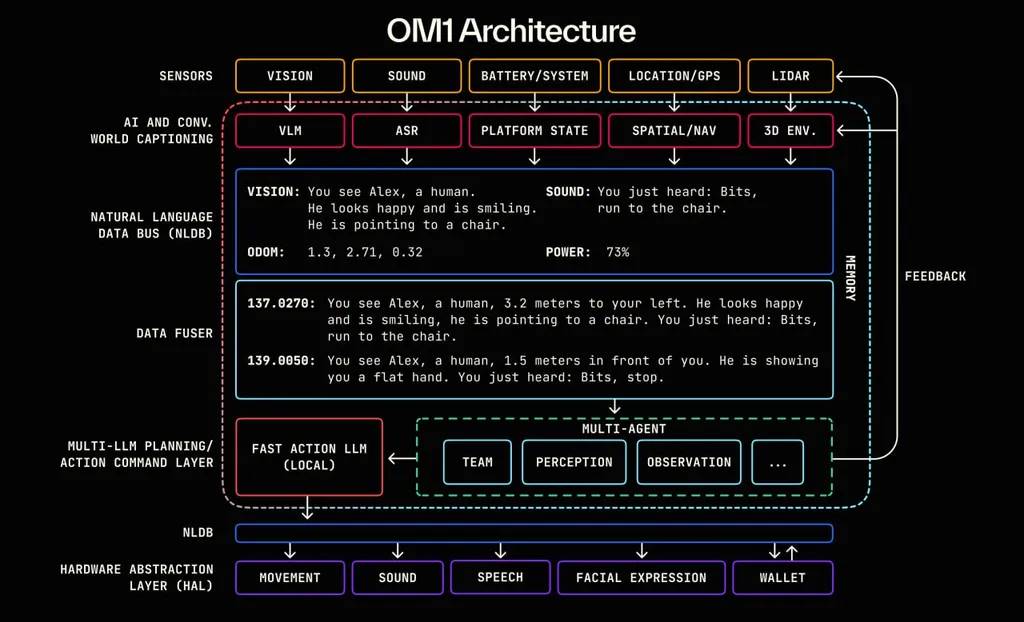
Architecture OM1
L’architecture OM1 se décline en sept couches :
- Couche capteurs : collecte des signaux issus des caméras, LIDAR, micros, état de batterie, GPS et autres sources multimodales.
- Couche IA + description du monde : les modèles multimodaux transforment données visuelles, audio et d’état en descriptions en langage naturel (exemple : « Vous voyez une personne saluer »).
- Canal de données en langage naturel : convertit toutes les perceptions en phrases horodatées échangées entre modules.
- Fusionneur de données : agrège les entrées pour générer des consignes contextuelles complètes destinées à la prise de décision en aval.
- Couche planification/décision multi-IA : plusieurs LLM interprètent le contexte et conçoivent un plan d’action selon des règles sur la blockchain.
- Canal descendant NLDB : transmet les décisions, via un intermédiaire linguistique, au système matériel d’exécution du robot.
- Couche d’abstraction matériel : traduit les commandes linguistiques en instructions de bas niveau pour les déplacements, la parole, les transactions, etc.
Déploiement rapide et adoption massive
OM1 comprend des outils intégrés pour transformer en un temps record toute idée en tâche exécutable par robot :
- Déploiement accéléré de compétences : exploitez le langage naturel et les grands modèles pour doter un robot de nouveaux comportements en quelques heures, et non en plusieurs mois.
- Fusion multimodale : assemblez vision, LIDAR, audio et autres capteurs sans développement manuel de la logique de fusion.
- API préintégrées pour grands modèles : interfaces prêtes à l’emploi pour GPT-4o, DeepSeek, VLMs et autres modèles langage/vision, avec prise en charge de l’interaction vocale.
- Compatibilité matériel/logiciel étendue : connexion fluide avec ROS2, Cyclone DDS et autres protocoles leaders, pour l’intégration dans les intergiciels existants. Que le robot soit un humanoïde Unitree G1, un quadrupède Go2, un Turtlebot ou un bras automatisé, OM1 s’y connecte de façon native.
- Intégration FABRIC : OM1 gère l’identité, la coordination des tâches et les paiements on-chain, permettant aux robots d’intégrer le réseau mondial de collaboration ou de fonctionner indépendamment.
OM1 équipe déjà des cas concrets :
- Frenchie (quadrupède Unitree Go2) : réalisation de missions terrain complexes lors du salon Defense Technology Showcase 2024 (USS Hornet).
- Iris (humanoïde Unitree G1) : participation à des démonstrations en direct lors d’EthDenver 2025 sur le stand Coinbase, et prochainement déployé dans des universités américaines via les cursus RoboStore.
FABRIC : réseau décentralisé de collaboration homme-machine
La collaboration reste le défi majeur : même les robots les plus avancés sont bridés s’ils ne peuvent interagir de manière fiable et sécurisée. Les robots issus de fabricants variés opèrent dans des écosystèmes fermés, empêchant le partage de données et de compétences ; la collaboration inter-marques et internationale souffre d’un manque d’identification et de protocoles communs. Les principaux verrous :
- Identité et localisation : comment vérifier l’identité, la position et la mission d’un robot.
- Partage de compétences et de données : permettre l’échange sécurisé de données et de capacités entre robots.
- Gouvernance de contrôle : définir la fréquence d’utilisation, la portée et les modalités de réversion des compétences et données.
FABRIC relève ces défis. Ce réseau collaboratif décentralisé conçu par OpenMind offre une identité, une allocation des tâches, une communication et un règlement unifiés pour robots et systèmes intelligents. Concrètement, FABRIC fait office de :
- Système de localisation pour robots, pour localiser et évaluer leur aptitude à collaborer ;
- Réseau privé virtuel pour robots, pour établir des connexions directes sécurisées sans la complexité des IP publiques ;
- Ordonnanceur de missions, automatisant la publication, l’attribution et la traçabilité de l’ensemble du cycle de vie des tâches.
Cas d’usage majeurs
FABRIC alimente déjà de nombreuses applications réelles, telles que :
- Prise de contrôle à distance et supervision : piloter des robots de n’importe où, sans infrastructure réseau dédiée.
- Places de marché de robots à la demande : commande à la demande de robots pour le nettoyage, l’inspection, la livraison, etc., à l’instar d’une plateforme de VTC.
- Cartographie et collecte participative de données : robots ou flottes transmettent en temps réel des données d’environnement pour bâtir des cartographies collaboratives haute précision.
- Scan ou cartographie à la demande : solliciter des robots locaux pour la modélisation 3D, l’inspection de chantiers ou la collecte de preuves pour l’assurance.
FABRIC garantit la traçabilité et la vérification transparente de qui a fait quoi, où, et avec quels résultats, tout en définissant les limites précises pour l’invocation de compétences et l’exécution des tâches.
À terme, FABRIC entend devenir le « magasin d’applications » de l’intelligence machine : chaque compétence pourra être licenciée et utilisée à l’échelle mondiale, et l’ensemble des usages nourrira en retour l’évolution du réseau collaboratif.
Web3 : l’ouverture ancrée au cœur de la société des machines
La robotique tend vers la centralisation, certains opérateurs contrôlant à la fois le matériel, les algorithmes et les réseaux, verrouillant l’innovation extérieure. La décentralisation garantit que, quel que soit le constructeur ou l’exploitant, tout robot puisse collaborer, échanger ses compétences et effectuer des règlements dans un réseau ouvert — sans plateforme exclusive.
OpenMind s’appuie sur l’infrastructure on-chain pour formaliser, de façon transparente, vérifiable et évolutive, les règles de collaboration, droits d’utilisation des compétences et modèles de rémunération :
- Identité vérifiée : chaque robot et opérateur crée une identité on-chain unique (standard ERC-7777), avec affichage transparent des caractéristiques, rôles et autorisations matérielles.
- Allocation ouverte des missions : les tâches sont publiées et attribuées selon des règles publiques, générant des preuves cryptographiques, datées et géolocalisées sur la blockchain.
- Règlement automatisé et partage des revenus : à la clôture des tâches, revenus, assurances et dépôts sont automatiquement libérés ou retenus, chaque partie pouvant vérifier les résultats en temps réel.
- Liquidité mondiale des compétences : des smart contracts encadrent la distribution, les limites d’usage et la compatibilité, protégeant la propriété intellectuelle tout en permettant l’invocation à l’échelle planétaire.
Ce schéma de collaboration est accessible à tous : chaque acteur de l’écosystème peut l’utiliser, le contrôler, le perfectionner. Pour les utilisateurs Web3, cela signifie une économie robotique anti-monopole, composable, auditable — une opportunité unique d’inscrire l’ouverture au fondement de la société machine.
Doter l’intelligence incarnée des moyens de sortir de l’isolement
Que ce soit pour sécuriser un service hospitalier, apprendre dans un établissement scolaire ou cartographier des quartiers urbains, les robots s’émancipent des démonstrations de salon pour devenir des membres fiables et quotidiens de notre société. Ils fonctionnent sans interruption, appliquent les consignes, gardent la mémoire, développent des compétences, et collaborent naturellement avec les humains et les autres machines.
Pour accompagner cette montée en puissance, il faut plus que des robots intelligents : il faut une base de confiance, un protocole d’interopérabilité et de collaboration solide. OpenMind, avec OM1 et FABRIC, a jeté les bases du secteur : OM1 assure une compréhension approfondie du monde réel et l’autonomie, FABRIC propage ces capacités à l’échelle planétaire. La prochaine étape consiste à déployer cette infrastructure dans de nouvelles villes et réseaux, afin de faire des machines des partenaires durables et fiables du tissu social.
La feuille de route OpenMind se décline ainsi :
Court terme : finaliser le prototype OM1 et le prototype FABRIC, déployer l’identité on-chain et les fonctions essentielles de collaboration.
Moyen terme : déployer OM1 et FABRIC dans les sphères éducatives, familiales et professionnelles, connecter les premiers utilisateurs, structurer la communauté de développement.
Long terme : établir OM1 et FABRIC comme standards universels, pour que chaque machine puisse rejoindre ce réseau ouvert — aussi aisément que l’on se connecte à Internet — et alimenter une économie mondiale des machines, responsable et pérenne.
À l’ère Web2, chaque robot restait enfermé dans son silo propriétaire, incapable de franchir les barrières logicielles et d’échanger ses données. Dans la vision d’OpenMind, les robots deviennent des nœuds d’un réseau ouvert mondial : libres de participer, d’apprendre, de collaborer et de régler, aux côtés des humains, dans une société machine transparente et digne de confiance. OpenMind rend possible cette transformation d’envergure.
Avertissement :
- Cet article est republié depuis TechFlow. Le copyright demeure la propriété de l’auteur original TechFlow. Pour toute question sur cette republication, veuillez contacter l’équipe Gate Learn. Nous répondrons à votre demande conformément à la procédure en vigueur.
- Avertissement : Les propos exprimés sont ceux de l’auteur et ne constituent pas un conseil en investissement.
- Les autres versions linguistiques de cet article ont été traduites par l’équipe Gate Learn. Reproduction, diffusion ou copie interdites, sauf mention explicite de Gate.com comme source.
Articles connexes

Qu'est-ce que Solscan et comment l'utiliser ? (Mise à jour 2025)

Qu'est-ce que Tronscan et comment pouvez-vous l'utiliser en 2025?

Qu'est-ce que Coti ? Tout ce qu'il faut savoir sur l'ICOT

Qu'est-ce que l'USDC ?

Explication détaillée des preuves à zéro connaissance (ZKP)
