Guia Completo do OpenMind: Como Construir um Sistema Operativo Global e uma Rede de Confiança para Inteligência Incorporada
Porque uma Era de Robótica Aberta é Fundamental
Nos próximos cinco a oito anos, estima-se que a população global de robôs ultrapasse um bilião. Este é um ponto de viragem crucial, em que os robôs deixam de ser demonstrações isoladas para se tornarem elementos essenciais na divisão do trabalho da sociedade. Já não se limitarão a braços mecânicos em linhas de montagem—serão colegas, professores e parceiros capazes de percepcionar, compreender, decidir e colaborar com pessoas.
Apesar do notável avanço do hardware robótico—que ganhou mãos mais ágeis, locomoção estável e capacidades sensoriais melhoradas—o verdadeiro obstáculo já não está no metal ou nos motores, mas sim em permitir aos robôs partilharem conhecimento e colaborarem:
- O software dos vários fabricantes ainda não é compatível, o que impede os robôs de partilharem competências e inteligência.
- Os mecanismos de decisão permanecem fechados em sistemas proprietários, impossibilitando verificação ou otimização externa.
- Arquiteturas de controlo centralizado travam a inovação e dificultam o desenvolvimento da confiança.
Esta fragmentação impede a indústria da robótica de transformar os avanços em IA em produtividade escalável: surgem inúmeras demonstrações de robôs isolados, mas sem migração entre dispositivos, decisões auditáveis ou normas comuns de colaboração. Assim, a verdadeira escalabilidade continua inalcançável. A OpenMind está a abordar este “último quilómetro”. Não pretendemos apenas criar robots melhores para entretenimento, mas sim fornecer uma base de software unificada e um padrão colaborativo para a diversidade global de robôs:
- Permitir que os robôs compreendam o contexto e aprendam uns com os outros;
- Capacitar programadores para desenvolverem aplicações rapidamente em plataformas modulares de código aberto;
- Garantir que humanos e máquinas colaboram e liquidam transações com segurança em protocolos descentralizados.
Na essência, a OpenMind está a criar um sistema operativo universal para robôs—um sistema que viabiliza não só a perceção e a ação, mas também a colaboração segura e à escala global em qualquer ambiente por via da coordenação descentralizada.
Quem Investe Nesta Visão: 20 Milhões USD em Financiamento e uma Equipa Global
A OpenMind angariou 20 milhões de dólares em rondas Seed e Série A, lideradas pela Pantera Capital, e com participação de destacados líderes mundiais em tecnologia e investimento:
- Tecnologia e capital ocidentais: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group, entre outros. Estas são referências no setor cripto e de infraestruturas de IA, apoiando a nova “agent economy and machine internet”.
- Recursos industriais orientais: Sequoia China e outros grandes players com profundo conhecimento das cadeias de abastecimento e produção robótica, e experiência prática com os desafios e limites da produção em massa de máquinas.
Em paralelo, a OpenMind colabora com participantes do mercado de capitais tradicional, como a KraneShares, para explorar formas de incorporar o valor de longo prazo de “robótica + agentes IA” em produtos financeiros estruturados, criando pontes entre o setor cripto e o mercado acionista. Em junho de 2025, aquando do lançamento do Global Humanoid & Embodied Intelligence Index ETF (KOID) pela KraneShares, a campainha de abertura da NASDAQ foi acionada por “Iris”, um robô humanoide desenvolvido em conjunto pela OpenMind e RoboStore—um marco histórico, pois foi a primeira vez que um robô humanoide realizou esta cerimónia na bolsa norte-americana.
Como salientou Nihal Maunder, sócio da Pantera Capital:
“Se queremos máquinas inteligentes a atuar em ambientes abertos, precisamos de uma rede de inteligência aberta. O que a OpenMind está a fazer pelos robôs equivale ao que o Linux fez pelo software e o Ethereum fez pela blockchain.”
Equipa e Conselheiros: Do Laboratório à Linha de Produção
O fundador da OpenMind, Jan Liphardt, é Professor Associado em Stanford e antigo docente em Berkeley, especializado em dados e sistemas distribuídos, com vasta experiência académica e de engenharia. Defende a reutilização open-source, substituindo sistemas de caixa negra por mecanismos auditáveis e rastreáveis, e integra IA, robótica e criptografia de forma multidisciplinar.
A equipa principal reúne especialistas oriundos da OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, entre outros. Juntos abrangem áreas-chave como controlo, perceção e navegação robótica, orquestração multimodal e de LLM, sistemas distribuídos e protocolos on-chain. Um conselho consultivo composto por líderes académicos e industriais—including Steve Cousins (Stanford Robotics), Bill Roscoe (Oxford Blockchain Center) e o Prof. Alessio Lomuscio (Safe AI, Imperial College)—assegura que as soluções robóticas da OpenMind permanecem seguras, conformes e fiáveis.
A Solução OpenMind: Duas Camadas, Uma Ordem
A OpenMind criou uma infraestrutura reutilizável que permite a colaboração e o intercâmbio de informação entre robôs, independentemente de dispositivos, fabricantes ou fronteiras:
- Lado do dispositivo: OM1, um sistema operativo nativo de IA para robôs físicos, fecha o ciclo da perceção à execução, para que qualquer robô—de qualquer forma—compreenda o seu contexto e execute tarefas.
- Lado da rede: FABRIC, uma rede de colaboração descentralizada, assegura identidade, atribuição de tarefas e mecanismos de comunicação para que os robôs se reconheçam, distribuam tarefas e partilhem o estado em tempo real.
Esta abordagem integrada (“sistema operativo + camada de rede”) permite que os robôs atuem autonomamente, mas também coordenem e harmonizem fluxos de trabalho para realizarem tarefas complexas em conjunto e de forma colaborativa.
OM1: Sistema Operativo Nativo de IA para o Mundo Físico
Tal como os smartphones precisam de iOS ou Android para executar aplicações, também os robôs necessitam de um sistema operativo capaz de implementar modelos de IA, processar dados sensoriais, inferir e executar ações.
O OM1 foi criado para cumprir esta função, servindo como sistema operativo nativo de IA para robôs reais, permitindo-lhes percepcionar, compreender, planear e operar em qualquer ambiente. Ao contrário dos sistemas fechados tradicionais de controlo robótico, o OM1 é open-source, modular e independente do hardware—suporta humanoides, quadrúpedes, robôs sobre rodas, braços robóticos e muito mais.
Quatro Etapas Essenciais: Da Perceção à Ação
O OM1 divide a inteligência robótica em quatro fases base: Perceção → Memória → Planeamento → Ação. Cada passo é modular e articulado por uma linguagem de dados padronizada, permitindo a combinação, articulação e validação cruzada dos componentes de inteligência.
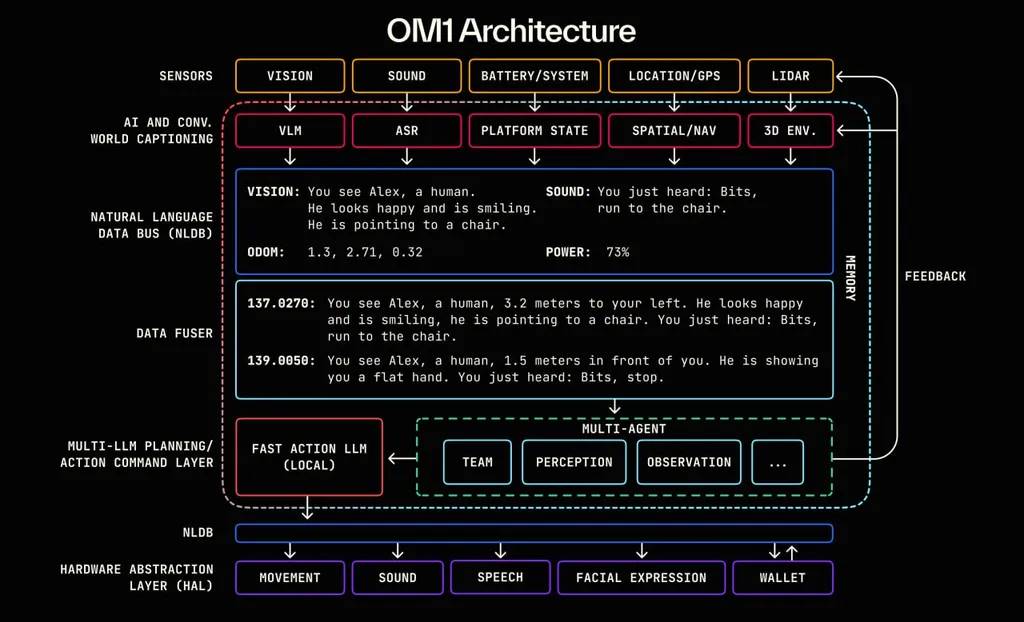
Arquitetura OM1
As sete camadas do OM1 são:
- Camada Sensores: Recolhe entradas de câmaras, LIDAR, microfones, bateria, GPS e outros sensores multimodais.
- Camada IA + Descrição do Mundo: Modelos multimodais transformam informação visual, áudio e de estado em descrições em linguagem natural (exemplo: “Observa uma pessoa a acenar”).
- Data Bus de Linguagem Natural: Converte perceções em frases marcadas no tempo, trocadas entre módulos.
- Fusor de Dados: Integra dados para gerar instruções contextuais detalhadas para as decisões seguintes.
- Camada Multi-AI de Planeamento/Decisão: Diversos LLM interpretam o contexto e elaboram planos de ação com base em regras on-chain.
- Canal Descendente NLDB: Transmite decisões, via linguagem, ao sistema de hardware do robô.
- Camada de Abstração de Hardware: Traduz comandos em linguagem em controlos de baixo nível para movimento, fala, transações, entre outros.
Integração Rápida e Implementação Abrangente
O OM1 disponibiliza ferramentas internas que permitem transformar rapidamente ideias em tarefas executáveis por robôs:
- Implementação rápida de competências: Utiliza linguagem natural e grandes modelos para equipar robôs com novos comportamentos em poucas horas.
- Fusão multimodal: Junta facilmente LiDAR, visão, áudio e outros sensores sem necessidade de programação manual.
- APIs para grandes modelos pré-integradas: Interfaces nativas para GPT-4o, DeepSeek, VLMs e outros modelos de linguagem/visão, incluindo interação por voz.
- Compatibilidade ampla de hardware/software: Liga-se de forma nativa a ROS2, Cyclone DDS e outros protocolos líderes, integrando-se com middleware já existente. Seja o humanoide Unitree G1, o quadrúpede Go2, o Turtlebot ou um braço robótico, o OM1 liga-se de forma nativa.
- Integração FABRIC: O OM1 suporta identidade, coordenação de tarefas e pagamentos on-chain, permitindo que robôs participem na rede global de colaboração ou operem de forma autónoma.
O OM1 já está a ser aplicado em cenários reais:
- Frenchie (quadrúpede Unitree Go2): Executou tarefas complexas no USS Hornet Defense Technology Showcase 2024.
- Iris (humanoide Unitree G1): Participou em demonstrações ao vivo na ETHDenver 2025 (stand Coinbase) e será integrado em currículos universitários dos EUA através dos programas educativos RoboStore.
FABRIC: Rede Descentralizada de Colaboração Humano-Máquina
Mesmo robôs avançados ficam limitados se não conseguirem colaborar de forma segura e com confiança entre si. Na prática, robôs de diferentes marcas funcionam em sistemas fechados que impedem a partilha de capacidades e dados, e a colaboração entre fabricantes ou países não tem protocolos nem identificação fiáveis. Os principais desafios são:
- Identidade e localização: Confirmar quem é o robô, onde está e o que faz.
- Partilha de competências e dados: Permitir a partilha segura de dados e o acesso às capacidades entre robôs.
- Governança do controlo: Definir frequência, âmbito e condições de devolução das competências e dados.
O FABRIC resolve estas questões enquanto rede descentralizada da OpenMind, proporcionando identidade, tarefas, comunicação e liquidação unificadas para robôs e sistemas inteligentes. O FABRIC desempenha o papel de:
- GPS dos robôs: Permite saber quem está onde e quem é adequado para cada colaboração.
- VPN para robôs: Garante ligações seguras e diretas sem IPs públicos ou configurações complexas.
- Agendador de tarefas: Automatiza a publicação, aceitação e registo de todo o ciclo das tarefas.
Casos de Utilização-Chave
O FABRIC já suporta diversas aplicações reais, tais como:
- Controlo remoto e monitorização: Operação segura de robôs à distância, sem necessidade de redes específicas.
- Marketplaces Robot-as-a-Service: Pedidos de robôs para limpeza, inspeção, entregas, etc.—semelhante a pedir um transporte.
- Mapeamento e recolha de dados por crowdsourcing: Frotas de robôs fornecem dados ambientais em tempo real, criando mapas partilhados de alta precisão.
- Digitalização/mapeamento sob pedido: Uso de robôs locais para modelação 3D, estudos de construção ou recolha de provas para seguros.
O FABRIC garante verificação e rastreabilidade transparentes de todas as operações—e define fronteiras claras para a execução e utilização de competências e tarefas.
Com o tempo, o FABRIC aspira a ser a “App Store” da inteligência das máquinas: competências podem ser licenciadas e acionadas globalmente, e os dados de utilização alimentam os modelos, promovendo a evolução contínua da rede.
Web3: A Abrir a Sociedade das Máquinas à Inovação
A robótica encontra-se cada vez mais centralizada, com poucas plataformas a controlar hardware, algoritmos e redes e a bloquear a inovação externa. A descentralização garante que, independentemente de quem construa ou opere o robô, este pode colaborar, partilhar competências e liquidar recompensas numa rede aberta—sem dependência de uma só plataforma.
A OpenMind utiliza infraestrutura on-chain para codificar regras de colaboração, autorizações de competências e modelos de pagamento numa “ordem de rede” aberta, auditável e facilmente ajustável:
- Identidade verificável: Todos os robôs e operadores registam uma identidade on-chain (padrão ERC-7777), com características de hardware, funções e permissões transparentes.
- Atribuição aberta de tarefas: As tarefas são publicadas, licitadas e atribuídas publicamente, sem barreiras. Todos os processos colaborativos geram provas cifradas, datadas e georreferenciadas, armazenadas em blockchain.
- Liquidação automática e partilha de receitas: Após as tarefas, receitas, seguros e cauções são liberados ou retidos automaticamente, permitindo verificação instantânea dos resultados por qualquer participante.
- Liquidez global de competências: Contratos on-chain definem limites de uso e compatibilidade, protegendo a propriedade intelectual e permitindo ativação e distribuição global.
Este quadro colaborativo é aberto a todo o ecossistema, auditável e passível de melhoria contínua. Para os utilizadores de Web3, isto significa que a economia robótica nasce anti-monopolista, composicional e auditável—uma oportunidade rara de fundar uma sociedade de máquinas aberta.
Dar Poder à Inteligência Incorporada para Sair do Isolamento
Quer estejam nas enfermarias hospitalares, nas salas de aula, ou a mapear cidades, os robôs estão a deixar de ser meros protótipos para se tornarem elementos fiáveis no dia-a-dia da sociedade. Operam sem parar, seguem regras, retêm memórias e competências, colaborando naturalmente com pessoas e outras máquinas.
Para escalar estes cenários, é preciso mais do que robôs inteligentes—é essencial dispor de um protocolo de confiança para interoperabilidade e colaboração. Com OM1 e FABRIC, a OpenMind estabeleceu esta fundação: o OM1 confere autonomia e compreensão do mundo aos robôs; o FABRIC difunde estas competências a nível global. O próximo passo é alargar esta infraestrutura a mais cidades e redes, tornando as máquinas parceiros permanentes e fiáveis no nosso tecido social.
A estratégia da OpenMind é inequívoca:
Curto prazo: Concluir o protótipo central do OM1 e a versão mínima viável do FABRIC; lançar a identidade on-chain e as principais funcionalidades colaborativas.
Médio prazo: Implementar OM1 e FABRIC na educação, lares e empresas; ligar early adopters e fomentar comunidades de programadores.
Longo prazo: Tornar OM1 e FABRIC o padrão global, para que qualquer máquina possa ligar-se à rede aberta—tal como se liga à Internet—e impulsionar uma economia das máquinas sustentável à escala mundial.
Na era Web2, robôs estavam presos em silos proprietários, sem possibilidade de troca de funções e dados entre plataformas. No mundo que a OpenMind idealiza, os robôs são nós iguais numa rede global aberta: livres para aderir, aprender, colaborar e realizar pagamentos, lado a lado com os humanos, numa sociedade de máquinas transparente e fiável. A OpenMind torna possível esta transformação à escala.
Aviso Legal:
- Este artigo foi republicado de TechFlow. Os direitos de autor são do autor original TechFlow. Para qualquer questão sobre esta republicação, contacte a equipa Gate Learn. O seu pedido será tratado rapidamente segundo os procedimentos aplicáveis.
- Aviso: As opiniões expressas pertencem ao autor e não constituem aconselhamento financeiro ou de investimento.
- Outras versões desta peça foram traduzidas pela equipa Gate Learn. Não reproduza, distribua ou copie este artigo traduzido sem a devida referência a Gate.com.
Artigos relacionados

Utilização de Bitcoin (BTC) em El Salvador - Análise do Estado Atual

O que é o Gate Pay?

O que é o BNB?

O que é o USDC?

O que é Coti? Tudo o que precisa saber sobre a COTI
